Asymmetries in Group-Individual Collision Avoidance due to Social Factors
DOI:
https://doi.org/10.17815/CD.2024.150Keywords:
Microscopic pedestrian dynamics, Social groups, Collision avoidanceAbstract
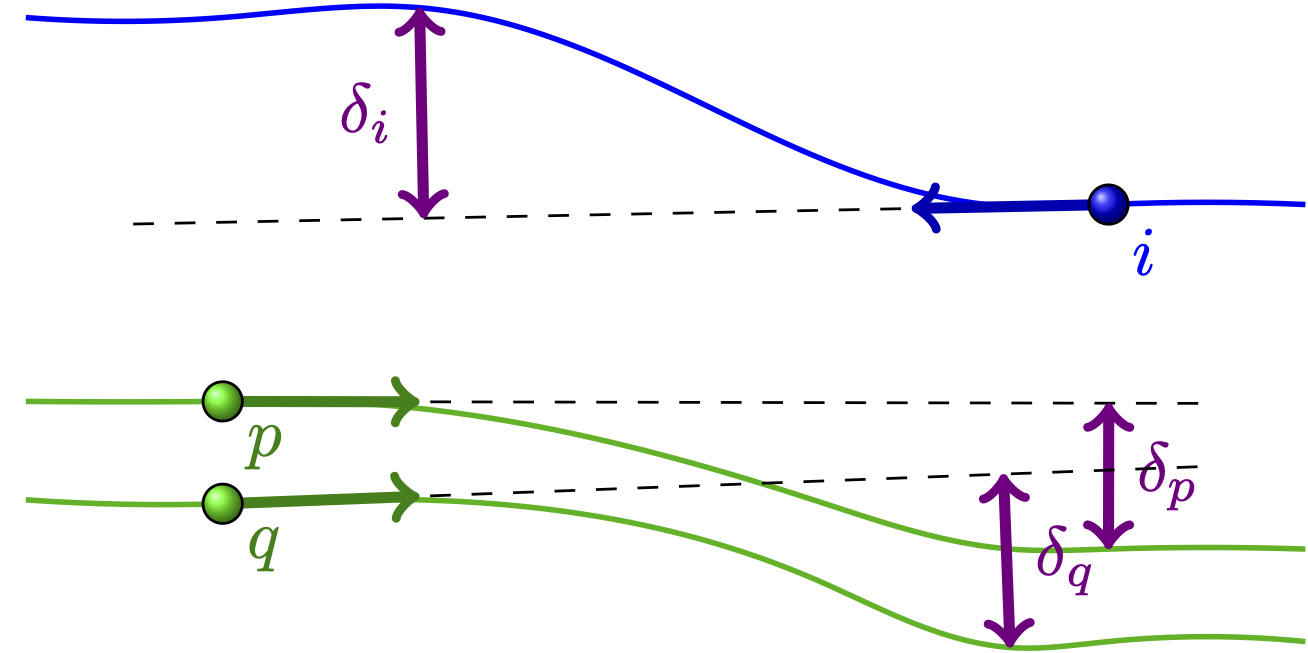
This research centers on analyzing frontal encounters between dyads (two-person groups) and individuals, aiming to measure each participant's role in avoiding collisions based on their deviation from their intended path. To achieve this, we establish the intended trajectory of each party by taking into account their walking direction leading up to the encounter. The largest discrepancy between this intended path and the observed path can be interpreted as the pedestrian's maximum lateral deviation.
We show a noteworthy discrepancy in deviation between group members and individuals in face-to-face encounters. Furthermore, we conduct an in-depth analysis of how the intensity of interaction among group members impacts collision avoidance dynamics. Notably, the contrast in deviation between individuals and group members is most pronounced when the level of interaction within the group is high. Ultimately, our findings consistently indicate that higher levels of interaction lead to more substantial deviations in the trajectories of encountered individuals and underscore the significant role of social dynamics in influencing pedestrian behavior during frontal encounters.
References
Cinelli, M.E., Patla, A.E.: Locomotor avoidance behaviours during a visually guided task involving an approaching object. Gait & Posture 28(4), 596-601 (2008). doi:10.1016/j.gaitpost.2008.04.006
Huber, M., Su, Y.H., Krüger, M., Faschian, K., Glasauer, S., Hermsdörfer, J.: Adjustments of speed and path when avoiding collisions with another pedestrian. PLOS ONE 9(2), e89589 (2014). doi:10.1371/journal.pone.0089589
Alhawsawi, A.N., Sarvi, M., Felemban, E., Rajabifard, A., Wang, J.: Understanding the characteristics of pedestrians when passing obstacles of different sizes: An experimental study. Collective Dynamics 6, 1–23 (2021). doi:10.17815/CD.2021.114
Cao, S., Li, Y., Ni, J., Wu, X.: Gait analysis and avoidance mechanism of pedestrians under the quantitative control of visibility. Transportmetrica A: Transport Science 0(0), 1-20 (2022). doi:10.1080/23249935.2022.2152300
Zhou, Z., Cai, Y., Ke, R., Yang, J.: A collision avoidance model for two-pedestrian groups: Considering random avoidance patterns. Physica A: Statistical Mechanics and its Applications 475, 142-154 (2017). doi:10.1016/j.physa.2016.12.041
Wang, Q.L., Chen, Y., Dong, H.R., Zhou, M., Ning, B.: A new collision avoidance model for pedestrian dynamics. Chinese Physics B 24(3), 038901 (2015). doi:10.1088/1674-1056/24/3/038901
Karamouzas, I., Heil, P., van Beek, P., Overmars, M.H.: A Predictive Collision Avoidance Model for Pedestrian Simulation. In: Egges, A., Geraerts, R., Overmars, M. (eds.) Motion in Games, Lecture Notes in Computer Science, pp. 41-52. Springer, Berlin, Heidelberg (2009). doi:10.1007/978-3-642-10347-6_4
Helbing, D., Molnar, P.: Social force model for pedestrian dynamics. Physical Review E 51(5), 4282-4286 (1995). doi:10.1103/physreve.51.4282
Shiomi, M., Zanlungo, F., Hayashi, K., Kanda, T.: Towards a Socially Acceptable Collision Avoidance for a Mobile Robot Navigating Among Pedestrians Using a Pedestrian Model. International Journal of Social Robotics 6(3), 443-455 (2014). doi:10.1007/s12369-014-0238-y
Corbetta, A., Meeusen, J.A., Lee, C.m., Benzi, R., Toschi, F.: Physics-based modeling and data representation of pairwise interactions among pedestrians. Physical Review E 98(6), 062310 (2018). doi:10.1103/PhysRevE.98.062310
Corbetta, A., Schilders, L., Toschi, F.: High-Statistics Modeling of Complex Pedestrian Avoidance Scenarios. In: Gibelli, L. (ed.) Crowd Dynamics, Volume 2: Theory, Models, and Applications, Modeling and Simulation in Science, Engineering and Technology, pp. 33-53. Springer International Publishing (2020). doi:10.1007/978-3-030-50450-2_3
Corbetta, A., Toschi, F.: Physics of Human Crowds. Annual Review of Condensed Matter Physics 14(1), 311-333 (2023). doi:10.1146/annurev-conmatphys-031620-100450
Gregorj, A., Yücel, Z., Zanlungo, F., Feliciani, C., Kanda, T.: Social aspects of collision avoidance: a detailed analysis of two-person groups and individual pedestrians. Scientific Reports 13(1), 5756 (2023). doi:10.1038/s41598-023-32883-z
Gregorj, A., Yücel, Z., Zanlungo, F., Kanda, T.: Influence of group social interaction on intrusive behaviours. In: Traffic and Granular Flow (2022, under review)
Gregorj, A., Yücel, Z., Zanlungo, F., Feliciani, C., Kanda, T.: On the influence of group social relation on the dynamics of pedestrians outside the group. In: Pedestrian and Evacuation Dynamics (2021, abstract)
Turchetti, G., Zanlungo, F., Giorgini, B.: Dynamics and thermodynamics of a gas of automata. Europhysics Letters 78(5), 58003 (2007). doi:10.1209/0295-5075/78/58003
Zanlungo, F., Ikeda, T., Kanda, T.: Potential for the dynamics of pedestrians in a socially interacting group. Physical Review E 89, 012811 (2014). doi:10.1103/PhysRevE.89.012811
Knapp, M.L., Hall, J.A., Horgan, T.G.: Nonverbal Communication in Human Interaction. Cengage Learning (2013)
Yücel, Z., Zanlungo, F., Shiomi, M.: Modeling the impact of interaction on pedestrian group motion. Advanced Robotics 32(3), 137-147 (2018). doi:10.1080/01691864.2017.1421481
Zanlungo, F., Kanda, T.: Do walking pedestrians stabily interact inside a large group? analysis of group and sub-group spatial structure. In: Proceedings of the Annual Meeting of the Cognitive Science Society, vol. 35 (2013)
Kitazawa, K., Fujiyama, T.: Pedestrian vision and collision avoidance behavior: Investigation of the information process space of pedestrians using an eye tracker. In: Pedestrian and Evacuation Dynamics 2008, pp. 95-108. Springer Berlin Heidelberg (2009). doi:10.1007/978-3-642-04504-2_7
Zanlungo, F.: A collision-avoiding mechanism based on a theory of mind. Advances in Complex Systems 10, 363-371 (2007). doi:10.1142/S0219525907001410
Downloads
Published
How to Cite
Issue
Section
Categories
License
Copyright (c) 2024 Adrien Gregorj, Zeynep Yücel, Francesco Zanlungo, Takayuki Kanda

This work is licensed under a Creative Commons Attribution 4.0 International License.
Authors contributing to Collective Dynamics agree to publish their articles under the Creative Commons Attribution 4.0 license.
This license allows:
Share — copy and redistribute the material in any medium or format
Adapt — remix, transform, and build upon the material
for any purpose, even commercially.
The licensor cannot revoke these freedoms as long as you follow the license terms.
Authors retain copyright of their work. They are permitted and encouraged to post items submitted to Collective Dynamics on personal or institutional websites and repositories, prior to and after publication (while providing the bibliographic details of that publication).